您现在的位置是:主页 > 模板分享 > 作品 >
“朱雀”腾飞,新算法推进……科技“芯”实力
发布时间:2025-10-22 12:20编辑:365bet登录浏览(57)
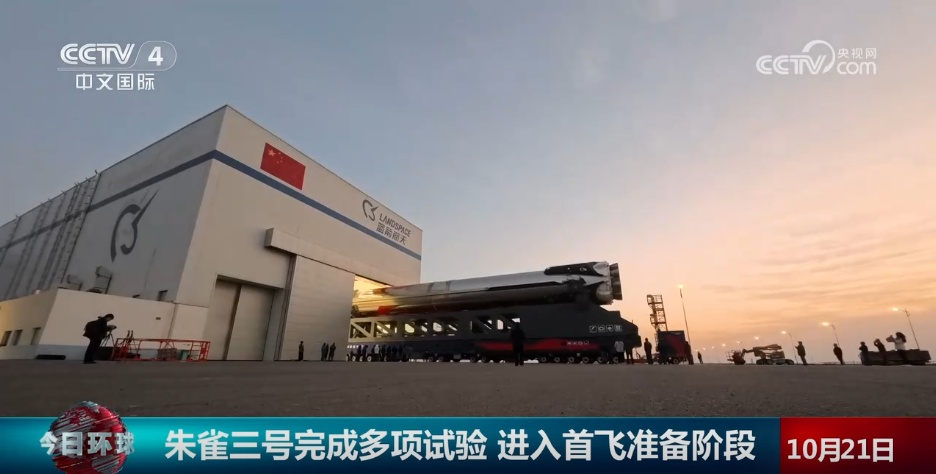 央视网消息:近日,我国自主研制的“朱雀三号”可重复使用火箭首飞顺利完成联合加油训练和静态点火试验,进入首飞准备的重要阶段。报道称,测试涵盖了火箭水平运动和组装、推进剂填充、发动机点火和密封、推进剂泄漏的全过程。第一个火箭飞行系统经过了与发射场系统的兼容性广泛测试。这相当于首飞前的一次“彩排”。据了解,此次“彩排”是朱雀三号首次试飞任务的第一阶段。朱雀三号大型火箭结构系统总设计师张雷:朱雀三号首飞试验第二阶段是以发射入轨为任务主要目标,同时开展第一阶段回收试验。恢复测试仅用于验证相关技术能力。目前朱雀三号正在按计划进行星罩总成垂直升空和对接训练,之后将返回技术区,为正式发射入轨和初步回收做好各项准备工作。张雷表示,将根据测试数据进行全面评审和状态恢复,进一步细化流程和方案。在保证质量和安全的前提下,我们将稳步推进二期工程建设,并顺利开展两次试验。朱雀三号:可用于建立大规模星座网络。朱雀三号,可重复使用、大运量、低成本,是我国自主研制的用于大型卫星组网任务的大型、可重复使用、高性能液体运载火箭。火箭体主要结构材料采用不锈钢。火箭长度66.1米,起飞质量约570吨s,起飞推力超过750吨。执行轨道发射任务后,可自主高精度返回,在回收场软着陆并重复使用。中国在机器人算法领域取得了长足进步。近日,中国科研团队在机器人算法领域取得重大进展,提出全球首个“混合力与位置控制算法统一理论”。该算法允许机器人在不依赖力传感器的情况下同时学习位置和力控制。与仅使用位置控制的策略相比,相关任务的成功率提高了约39.5%。更值得注意的是,相关论文获得了国际机器人学习大会最佳论文奖。这是该奖项设立以来首次由中国学者团队获此殊荣。在北京人工智能研究院试验场,四台搭载新算法的双腿机械狗有条不紊地执行擦黑板的训练任务。研究人员通过这个实际场景向记者讲解了混合力位控制算法的基本原理和优越优势。科学研究人员表示,机器人不仅需要了解“去哪里”和“到哪里”,还需要了解“使用多少力量”。在混合力和位置控制算法出现之前,这些问题必须使用力传感器来解决。人与机器之间更加流畅的协作扩展了应用场景的多样性。通过综合应用混合力和位置控制算法,机器人不仅可以在没有力传感器的情况下进行位置跟踪、施力、力跟踪和兼容交互,而且还可以进行位置跟踪、施力、力跟踪和兼容交互等多种运动行为。这显着增加了missi成功率方面,还在人机协作的安全性方面取得了重大进展,为未来机器人应用场景的开发铺平了道路。这为此次展览奠定了基础。
央视网消息:近日,我国自主研制的“朱雀三号”可重复使用火箭首飞顺利完成联合加油训练和静态点火试验,进入首飞准备的重要阶段。报道称,测试涵盖了火箭水平运动和组装、推进剂填充、发动机点火和密封、推进剂泄漏的全过程。第一个火箭飞行系统经过了与发射场系统的兼容性广泛测试。这相当于首飞前的一次“彩排”。据了解,此次“彩排”是朱雀三号首次试飞任务的第一阶段。朱雀三号大型火箭结构系统总设计师张雷:朱雀三号首飞试验第二阶段是以发射入轨为任务主要目标,同时开展第一阶段回收试验。恢复测试仅用于验证相关技术能力。目前朱雀三号正在按计划进行星罩总成垂直升空和对接训练,之后将返回技术区,为正式发射入轨和初步回收做好各项准备工作。张雷表示,将根据测试数据进行全面评审和状态恢复,进一步细化流程和方案。在保证质量和安全的前提下,我们将稳步推进二期工程建设,并顺利开展两次试验。朱雀三号:可用于建立大规模星座网络。朱雀三号,可重复使用、大运量、低成本,是我国自主研制的用于大型卫星组网任务的大型、可重复使用、高性能液体运载火箭。火箭体主要结构材料采用不锈钢。火箭长度66.1米,起飞质量约570吨s,起飞推力超过750吨。执行轨道发射任务后,可自主高精度返回,在回收场软着陆并重复使用。中国在机器人算法领域取得了长足进步。近日,中国科研团队在机器人算法领域取得重大进展,提出全球首个“混合力与位置控制算法统一理论”。该算法允许机器人在不依赖力传感器的情况下同时学习位置和力控制。与仅使用位置控制的策略相比,相关任务的成功率提高了约39.5%。更值得注意的是,相关论文获得了国际机器人学习大会最佳论文奖。这是该奖项设立以来首次由中国学者团队获此殊荣。在北京人工智能研究院试验场,四台搭载新算法的双腿机械狗有条不紊地执行擦黑板的训练任务。研究人员通过这个实际场景向记者讲解了混合力位控制算法的基本原理和优越优势。科学研究人员表示,机器人不仅需要了解“去哪里”和“到哪里”,还需要了解“使用多少力量”。在混合力和位置控制算法出现之前,这些问题必须使用力传感器来解决。人与机器之间更加流畅的协作扩展了应用场景的多样性。通过综合应用混合力和位置控制算法,机器人不仅可以在没有力传感器的情况下进行位置跟踪、施力、力跟踪和兼容交互,而且还可以进行位置跟踪、施力、力跟踪和兼容交互等多种运动行为。这显着增加了missi成功率方面,还在人机协作的安全性方面取得了重大进展,为未来机器人应用场景的开发铺平了道路。这为此次展览奠定了基础。
下一篇:没有了